
Overview: Analyze the photos of trains I took with EOS R to clarify the ability of EOS R AI servo AF system.
目次
EOS RのAIサーボは使い物になるのか?
わたしはスナップ写真以外ですと鉄道の写真をよく撮るので、カメラの性能の中では連写性能と動体追尾AF(キヤノンですとAIサーボAFですね)の性能を重視してきました。
最近は歳を取って枯れてきたせいか走る列車を正面からアップで捉える、といったアグレッシブな撮り方はしなくなりました。従って、動体追尾の重要性も以前に比べると若干下がりはしたのですが、相変わらず重要なポイントの一つです。
EOS Rは、動くものを捉える能力が低いのではないかという噂もありましたが、今使っているEOS 1D-MKⅣに比べてフルサイズ、かつ画素数が約二倍になる、という魅力には抗しがたく、AFが駄目ならROS Rは置きピン専用機になっても良し、という覚悟で購入しました。
列車の撮影でオートフォーカスの性能をチェック
マップカメラに予約を入れていたEOS Rは、発売日当日の10月25日に宅配便で届きましたので、早速これを持って小海線の撮影に出掛けました。10月27日に出発し、28、29日と撮影をしました。
最初はEOS 1D-MKⅣをメインにちょこっと試すだけのつもりだったのですが、この10年間のカメラの進歩は素晴らしく、EOS Rがあまりに使いやすいため、後半になるとEOS Rばかり使っていました。
とは言っても、EOS Rの画質をろくにチェックせずに出掛けたため、自宅に戻って画像をチェックするまではちゃんと撮れているかどうか心配でした。
結論
AIサーボAFがしっかり仕事をしている証拠はつかめませんでしたが、出てきた画像はピントが合っていますので、今回の撮影に関しては問題ありませんでした。パラメーターの最適値を見いだした上で撮影を行い、ピンボケが起きにくい撮影方法、手順を見つけ出したいと思います。
- この二日間に約10本の列車をEOS Rで撮影しましたが、あからさまに失敗したのは測距点の設定をミスった最初の2本だけでした。
- 但し、撮影時に液晶モニターでチェックしても、キヤノンのソフト、Digital Photo Professional を使ってチェックしても、測距点が列車に反応している証拠はつかめませんでした。
- しかしながら、今後とも今回のレベルでピントが合うならわたしは十分満足です。
ご自分が満足されるかどうかを知りたい方は、以下のテスト内容、テスト結果詳細をご覧下さい。
テスト内容、テスト結果詳細
現地でAIサーボAFの挙動を調整
各項目の意味はうろ覚えでしたが、下記のように設定してみました。
- 被写体追従特性 0
- 速度変化に対する追従性 -1 (やや弱め)
- 測距点乗り移り特性 1 (やや乗り移りやすい)
ケース1 前方から迫ってくる列車
一つ目は下記の画像です。(下記画像は列車が切れていますが、本記事では、RAWで撮ったままの画像をレタッチ、トリミング無しでそのまま使用しています)
これは、AIサーボAFが使われる条件として典型的なものだと思います。
このときの使用レンズは、
TAMRON 大口径ズームレンズ SP AF28-75mm F2.8 XR Di キヤノン用 フルサイズ対応 A09E
撮影は手持ちで行っています。(アングルはあまり変化していませんが)

測距点の合焦状況
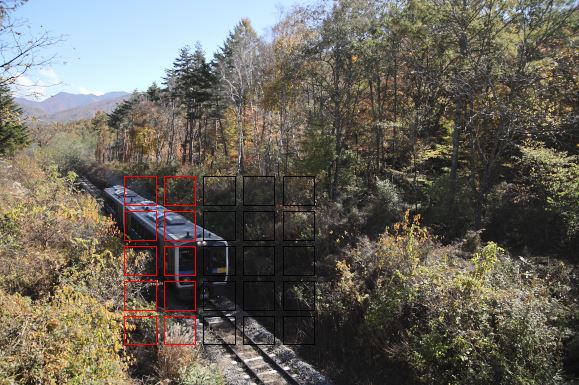
列車が遠方に見えたところから撮影を開始しており、上記写真は連写で撮影した最後の画像です。自宅に帰ってから、キヤノンのDigital Photo Professionalを使うと焦点が合っている測距点を表示できることを発見したので、それを使って各場面でどの測距点にピントが合っているのかをご覧いただきましょう。
ゾーンAFを使用しており、赤くなっている測距点が合焦している測距点です。
1コマ目

2コマ目

3コマ目
4コマ目
5コマ目

わたしはとてもがっかりしたのですが、いかがでしょうか?
これはつまり、列車が迫ってきても合焦している測距点がまったく変わっていない ということですよね?
そして、がっかりすると同時にとても驚いたのは、どの画像も列車にピントが合っているのです。(少なくともわたしなら十分満足と言えるレベルには)
被写体(列車先端)の合焦具合
では、肝心の被写体(列車)にはピントが合っているのでしょうか?
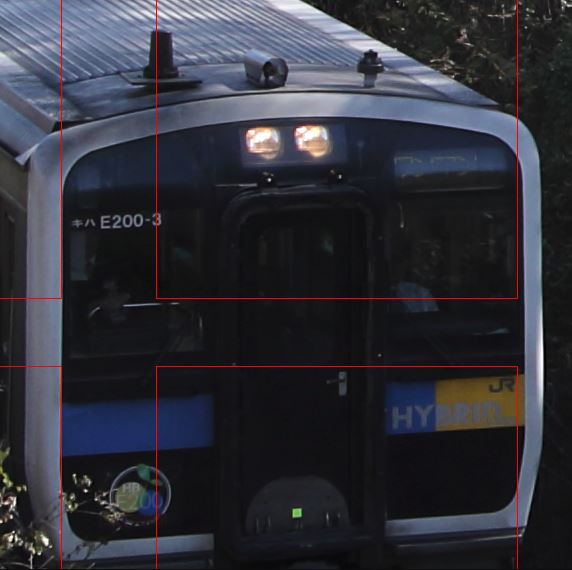
上記と同じコマで、列車の先端部を等倍表示してスニッピングツールで切り出した画像をご覧下さい。
1コマ目

2コマ目
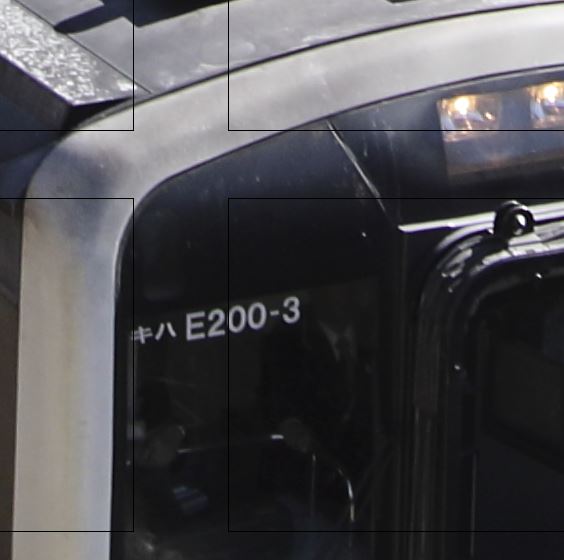
3コマ目

4コマ目

5コマ目
細かく見れば車両番号の文字がややにじんでいるようにも思えますが、これはどう見てもAIサーボAFがきっちり仕事をしているとしか思えません。(そうでなければ、この文字はこんなに綺麗に見えません)
固定された位置の合焦具合
そこで、今度は地上の同じ位置のピントがどう変わっているかを見てみます。AIサーボAFが仕事をしているのなら、地上の同じ位置のピントは、列車の移動と共に変化するはず。

上記写真の黄色の丸で囲んだ部分が各コマでどう見えているか、ピクセル等倍で比べてみます。
1コマ目

2コマ目

3コマ目

4コマ目

5コマ目

どうですか?これにもビックリ。
ピントの合い具合が変化していません。
一体、AIサーボAFは仕事をしているのか? していないのか?
ちなみに、最後のコマである5コマ目の撮影条件はこちら。
ISO感度を含めて変化させて露出を決める「フレキシブルAE」を使っています。(このときはシャッタースピードのみ指定で、あとはカメラにおまかせ)
絞りは5.0ですから、被写界深度はかなり浅いはずです。(普段のわたしならピンボケを恐れて可能な限り8~10くらいまで絞ります)
うーん、結果オーライだが、何が起きているのかよく分かりません。
再びAIサーボAFの挙動を調整
この後、道行くトラクターで測距点の挙動を見ながら、もう一度パラメーターを調整しました。(ケース1で示した結果は現地では分かっていません)
トラクターで合わせてみた限りでは、被写体が近づいてきても測距点が一番近くにあるものに対して合焦したまま変わらないため、下記のように調整して、ケース2を撮影しました。
- 被写体追従特性 0→2 (距離の異なる被写体に、次々にピントを合わせやすいが、障害物に弱い)
- 速度変化に対する追従性 -1→そのまま (やや弱め)
- 測距点乗り移り特性 1→2 (別の測距点に乗り移りやすい)
ケース2 前方を横切りながら近づいてくる列車
前方を左から右へ横切りながら近づいてくる列車です。この例では対象物も小さいので、AIサーボAFにはやや苦手なケースかも。
なお、一連の撮影において、カメラの向きは列車の動きに合わせて変化させています。(列車をなるべく画面の中心に持ってこようとしているため、いわば流し撮り的なカメラの動きになっています。)

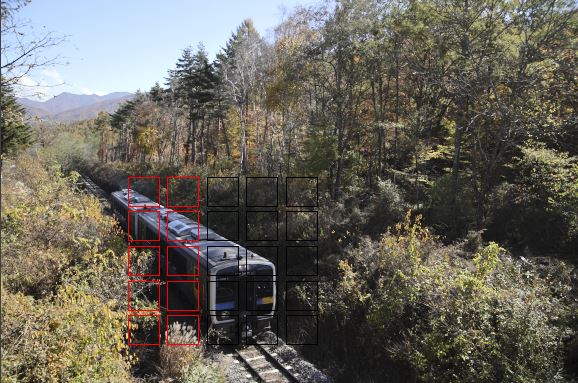
測距点の合焦状況
ケース1同様、キヤノンDigital Photo Professionalを使って測距点の合焦状況を調べました。
1コマ目

2コマ目

3コマ目

うーん、これはひどい(笑)
列車はまったく相手にされていません。
まあしかし、カメラを流し撮りのように動かしているので、背景と被写体の区別がわかり辛いのかも。
被写体(列車先端)の合焦状況
横切っているとは言え、列車との距離はかなり変化していますが、被写体である列車のピントはどうなっているでしょうか?
前項同様に、等倍切り出しで見てみます。
1コマ目

2コマ目

3コマ目

うん、良いですね。わたしはこれなら十分満足。
1コマ目の列車は遙か彼方なのでちょっとぼけて見えますが、2コマ目、3コマ目は十分OKではないでしょうか?
固定された位置の合焦状況
前項同様、同じ位置の合焦状況がどう変わっているかをチェックします。
但し、今回はカメラを振っているので、1コマ目と3コマ目では背景がほぼ入れ替わっています。そこで、1コマ目と2コマ目、2コマ目と3コマ目を別個に比較します。
1コマ目と2コマ目
黄色で囲んだ鉄道の標識(?)を拡大します。

1コマ目

2コマ目

大きさが違いますが、列車の位置とこの標識の位置が近い二コマ目の方がややピントが合っているように見えます。(しかし、よく見ると変わっていないようにも見えます。まあ、その程度の違いですね)
2コマ目と3コマ目
2コマ目で画面の右端、3コマ目で列車とほぼ同じ位置に来る自動車の変化を見てみます。

2コマ目

3コマ目

3コマ目はカメラの角度変化が早いせいで自動車はややぶれていますが、ピントは2コマ目、3コマ目ともほぼ合っています。
3コマ目の撮影条件はこちら。
絞りはやや絞られていますが、この程度でパンフォーカスになるとは思えません。
従って、AIサーボAFが活躍していると認めざるを得ません。
(がしかし、ひょっとするとAF固定のままでもこれが撮れてしまう、という可能性も完全には否定できない…)
ちょっとすっきりしませんが、続きは追って。
以上、読んで下さりありがとうございます。
この続きは、下記の記事をご参照ください。
To be continued to the below article.